현대차그룹 정의선 회장의 지칠줄 모르는 도전. 이제 지상 항공을 넘어 우주로 향한다. "임자, 해봤어"하며 불모지에서 불가능해보이는 과제에 도전한 창업주 고 정주영 명예회장을 연상시킨다는 얘기도 나온다.
현대차그룹이 달 표면을 주행하며 탐사하는 ‘로버’ 개발에 착수했다고 20일 밝혔다. 전통적인 자동차 부문을 넘어 우주 모빌리티(이동수단)로 사업 영역을 확장하는 것이다. 로버는 바퀴가 달려 외계행성 표면을 돌아다니며 탐사하는 로봇의 일종이다.
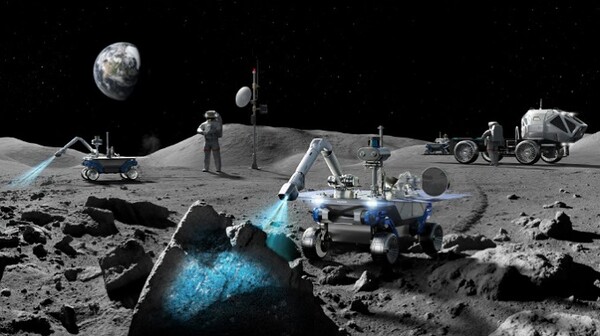
현대차그룹은 이날 로버 개발모델의 콘셉트 이미지를 공개했다.
개발할 모델은 자율주행 이동체로 태양광을 통해 자체 충전한다. 무게는 최대 70㎏, 상부와 하부로 구분된다. 상부는 달 표면 탐사 기능을 수행한다. 하부는 구동계로 이동을 담당한다. 하부에 현대차그룹의 자율주행 등 모빌리티 기술이 적용된다.
달 표면을 자유롭게 돌아다닐 수 있는 플랫폼 형태로 만들 계획이다. 상부에 기능이 바뀌거나 추가되더라도 하부 플랫폼은 그대로 쓸 수 있도록 해 활용도를 높일 수 있다.
로버는 완성되면 달 남극에 착륙해 광물 채취 및 환경 분석 등의 과학 임무를 수행하게 된다. 로버는 달의 극한 환경에 견딜 수있도록 튼튼하게 만든다. 달 표면의 기온차는 300℃ 이상으로 열관리 및 방사능 차폐 장치, 금속 구동 휠 등이 적용된다.
로버개발 모델 제작은 이르면 내년 하반기 중 마무리지을 계획이다. 이후 달 표면과 비스한 환경에서 주행 및 임무수행 연구를 진행한 뒤 2027년 실제 달 표면을 탐사할 수 있는 이동체를 내놓겠다는 것이다.
현대차그룹은 지난해 7월 로버 개발을 위해 다자 공동연구 협약을 맺었다. 한국천문연구원(KASI), 한국전자통신연구원(ETRI), 한국건설기술연구원(KICT), 한국항공우주연구원(KARI), 한국원자력연구원(KAERI), 한국자동차연구원(KATECH) 등 6개의 국내 우주 분야 연구기관과 손잡았다. . 이후 현대차그룹은 연구기관들과 논의를 거쳐 초기 모델 제작 방향을 구체화했다.
로버의 완성 시기는 내년 하반기로 예측된다. 완성 이후에는 달 표면과 유사한 환경에서 주행과 임무 수행 연구 같은 사전 연습을 하게 된다. 현대차그룹은 로버가 완성된 제품으로 달에서 임무 수행이 가능한 시점을 2027년으로 보고 있다.